




Егор
- Ответ от администратора
- Добрый день, Егор! Благодарим за высокую оценку товара! С уважением, команда DJI-Rus






Всегда актуальное наличие
Отправка в день заказа
Гарантия 12 месяцев
Возврат и обмен
Цены c учётом НДС
Работа с юр. лицами по договору и ЭДО
Откройте официальный SDK, чтобы разблокировать скрытую креативность
RoboMaster EP открывает официальный SDK DJI и поддерживает более 50 программируемых сенсорных интерфейсов, что позволяет вам более интуитивно понимать все аспекты этой передовой технологии на практике, открывая новые возможности для обучения программированию.

Базовая платформа имеет зарезервированные отверстия для расширения и структурные стержни, что позволяет учащимся расширять конструкцию и гибко строить на этой основе, что делает занятия в классе более интересными.
.jpg?1708681292215)
RoboMaster EP поддерживает внешнее стороннее оборудование с открытым исходным кодом, а также поддерживает обучение моделей и распознавание сцен через платформу чипов искусственного интеллекта, помогая студентам получить более глубокое понимание принципов работы искусственного интеллекта на практике.
.jpg?1708681301153)
Движимые интересом, поощряются бесстрашные исследования, а новаторский дух студентов, ориентированный на будущее, культивируется на практике.
.jpg?1708681329452)
Курсы охватывают передовые научные и технологические области, такие как робототехника, программирование, машиностроение и искусственный интеллект.Весь набор курсов сочетает в себе систематические теоретические знания с проектной инженерной практикой и объединяет междисциплинарные знания, такие как физика и математика.
.jpg?1708681345273)
 |  |  |
| Бесщеточный двигатель M3508I ESC × 4 | Крышка вала типа X × 1 | Зарядное устройство × 1 |
 |  |  |
| Зарядное устройство, шнур переменного тока × 1 | Люк шасси × 1 | Задняя броня шасси × 1 |
 |  |  |
| Лобовая броня шасси × 1 | Верхняя крышка корпуса × 1 | Правая броня шасси × 1 |
 |  |  |
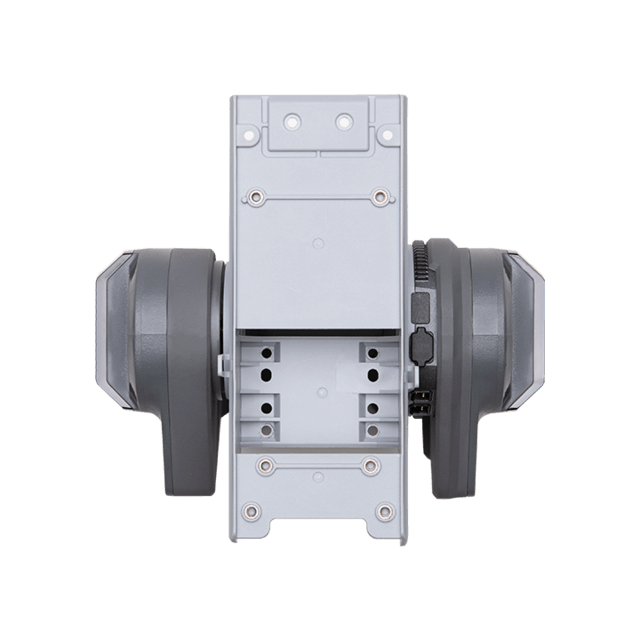
| Средняя рама шасси (включая интеллектуальную батарею) × 1 | Шасси левое бронирование × 1 | Моторная база × 4 |
 | 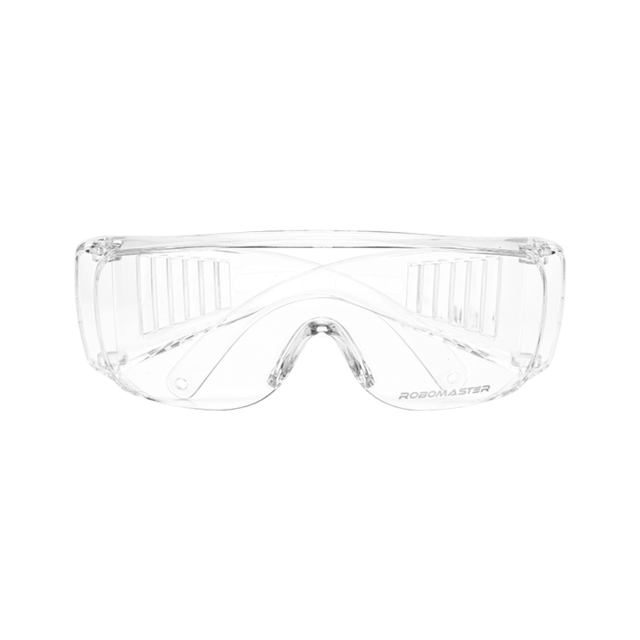 |  |
| Фиксатор × 1 | Очки для плавания × 1 | Модуль обнаружения попаданий × 1 |
 |  |  |
| Амортизирующий кольцевой кронштейн × 4 | Винтовая коробка × 1 | Ролик × 48 |
 |  |  |
| Амортизирующее кольцо Mai Lun × 4 | Коробка для сборки пшеничного колеса × 1 | Изоляционная лента × 1 |
 |  |  |
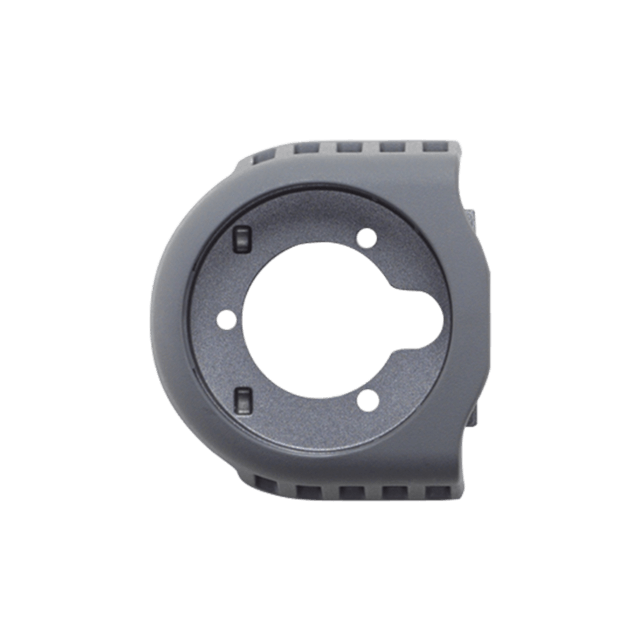
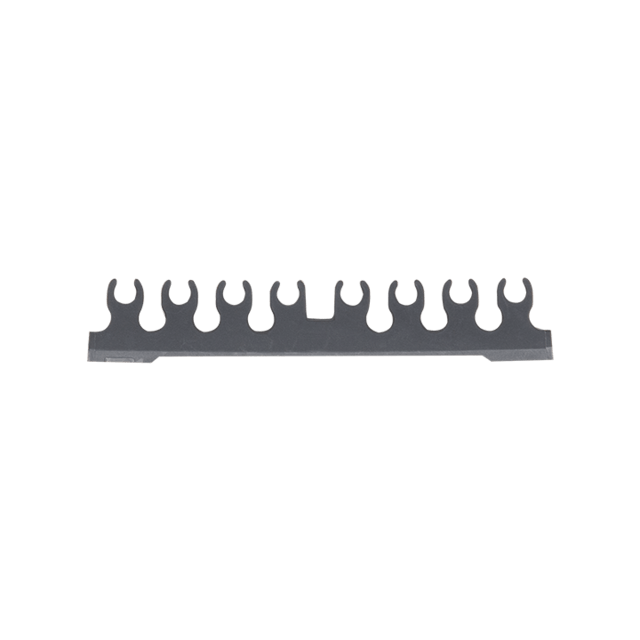
| Хрустальные бомбы в бутылках × 1 | Рычаг передней оси × 1 | Верхняя крышка переднего моста × 1 |
 |  |  |
| Смазка × 1 | Метка × 7 | Кабель для передачи данных (35 см) × 1 |
 |  |  |
| Кабель для передачи данных (23 см) × 1 | Кабель для передачи данных (12 см) × 1 | Камера × 1 |
 |  |  |
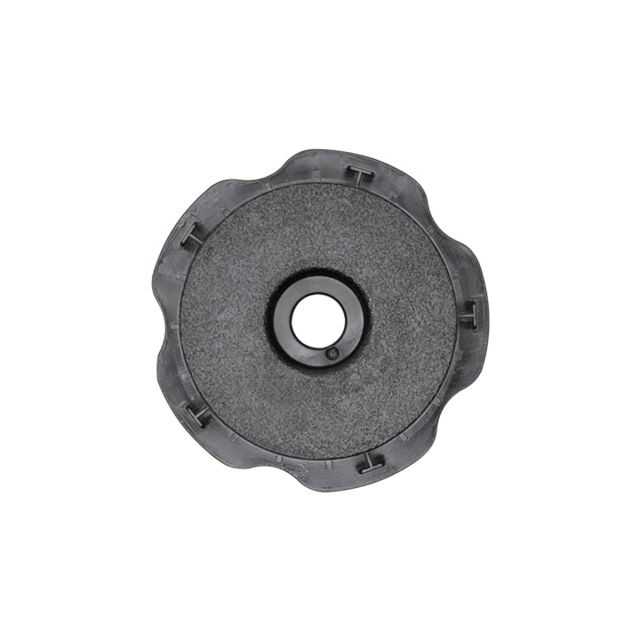
| Кабель камеры × 1 | Правая внутренняя ступица × 2 | Правая внешняя ступица × 2 |
 |  |  |
| Левая внутренняя ступица × 2 | Левая внешняя втулка × 2 | ПТЗ × 1 |
 | 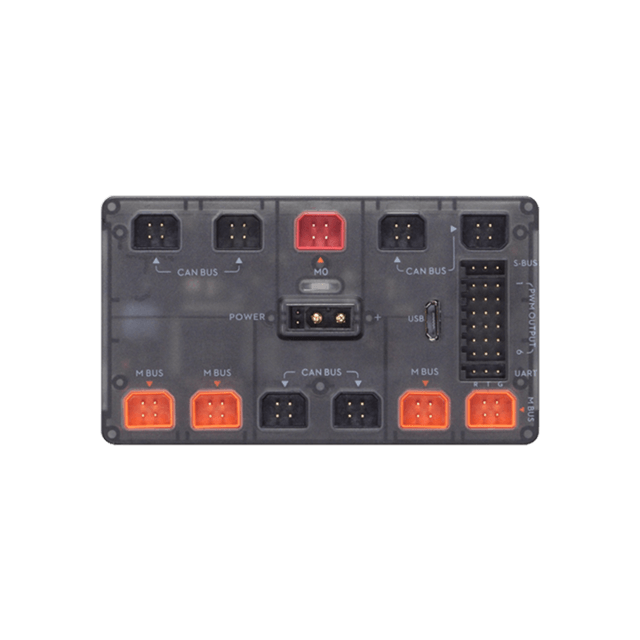 |  |
| Оратор × 1 | Контроллер движения × 1 | Интеллектуальное центральное управление × 1 |
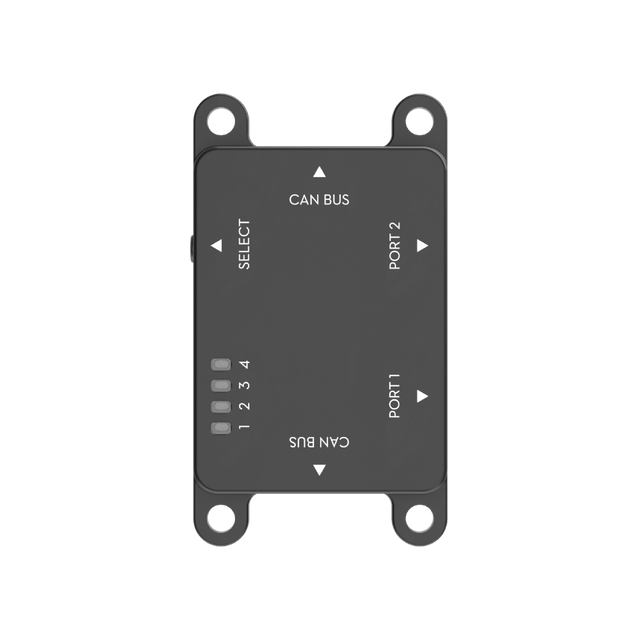 | 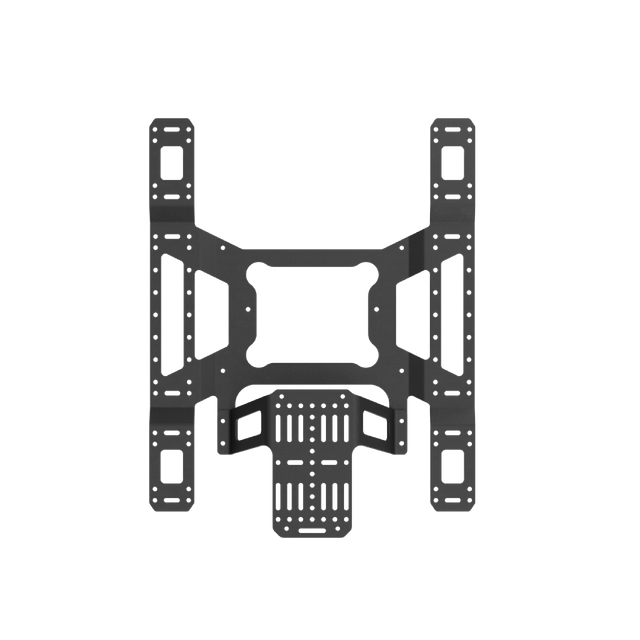 | 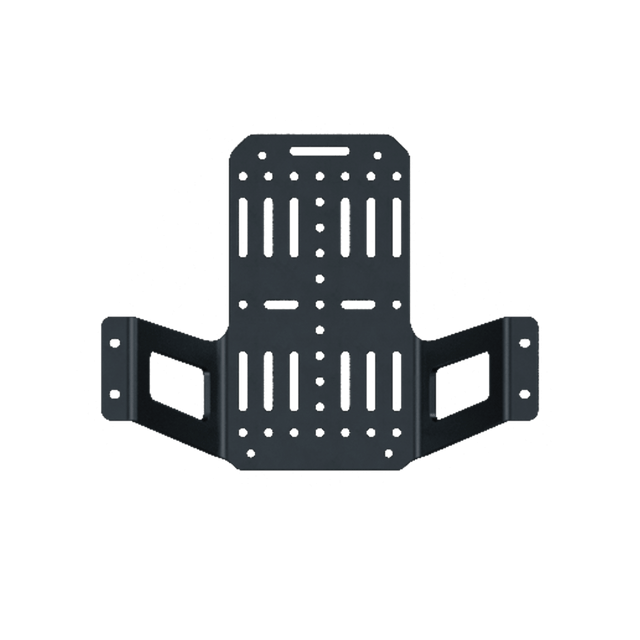 |
| Модуль адаптера датчика × 4 | Опорная пластина расширения корпуса × 1 | Задняя панель расширения шасси × 1 |
 | 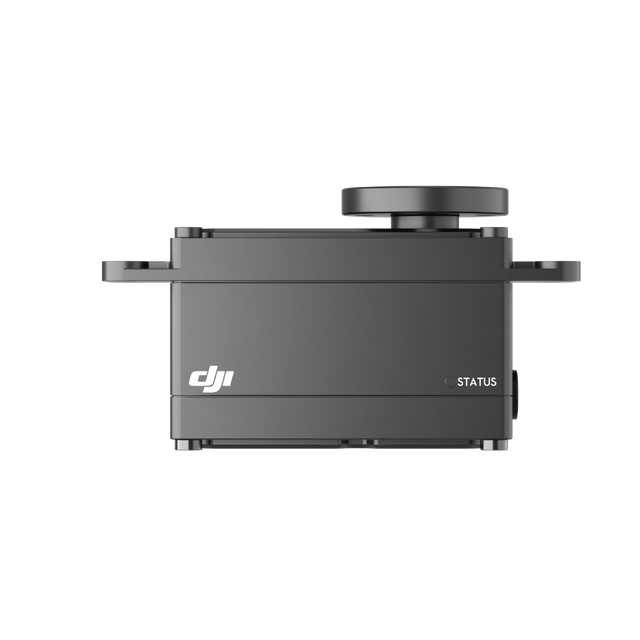 |  |
| Модуль передачи мощности × 1 | Рулевой механизм × 2 | Инфракрасный датчик глубины × 1 |
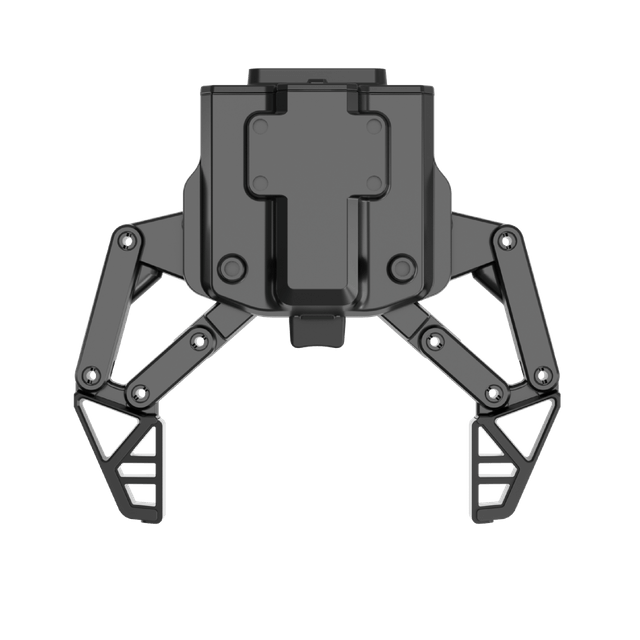 |  | 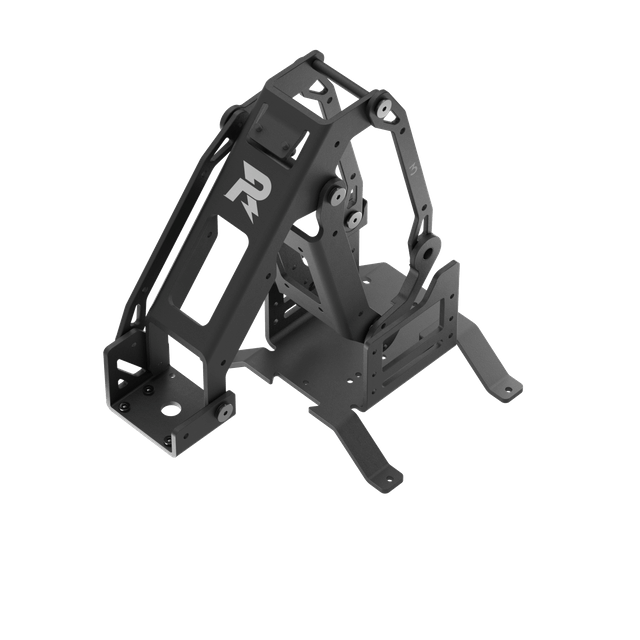 |
| Механический коготь × 1 | Линейная карта × 10 | Роботизированная рука × 1 |
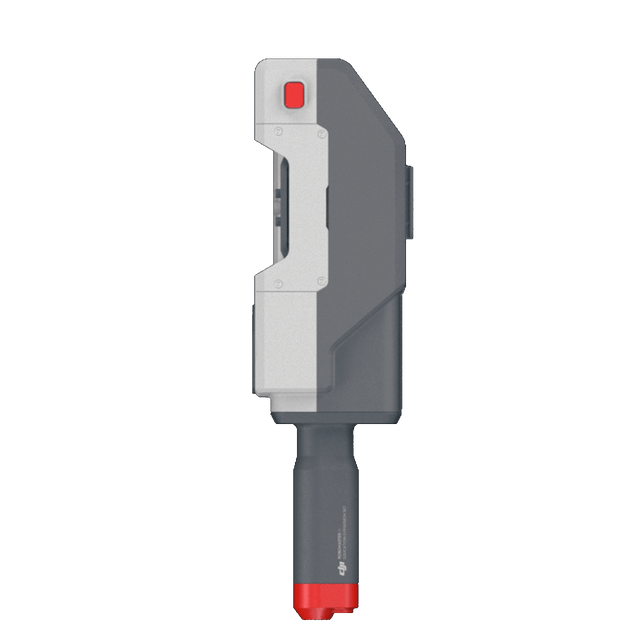 | ||
| Лаунчер (включая журнал) × 1 |
- Ответ от администратора
- Добрый день, Егор! Благодарим за высокую оценку товара! С уважением, команда DJI-Rus

© 2018 - 2026 DJI. Официальный интернет магазин DJI в России